
- Usable Devices :
-
- Found at :
 www.adafruit.com
www.adafruit.com

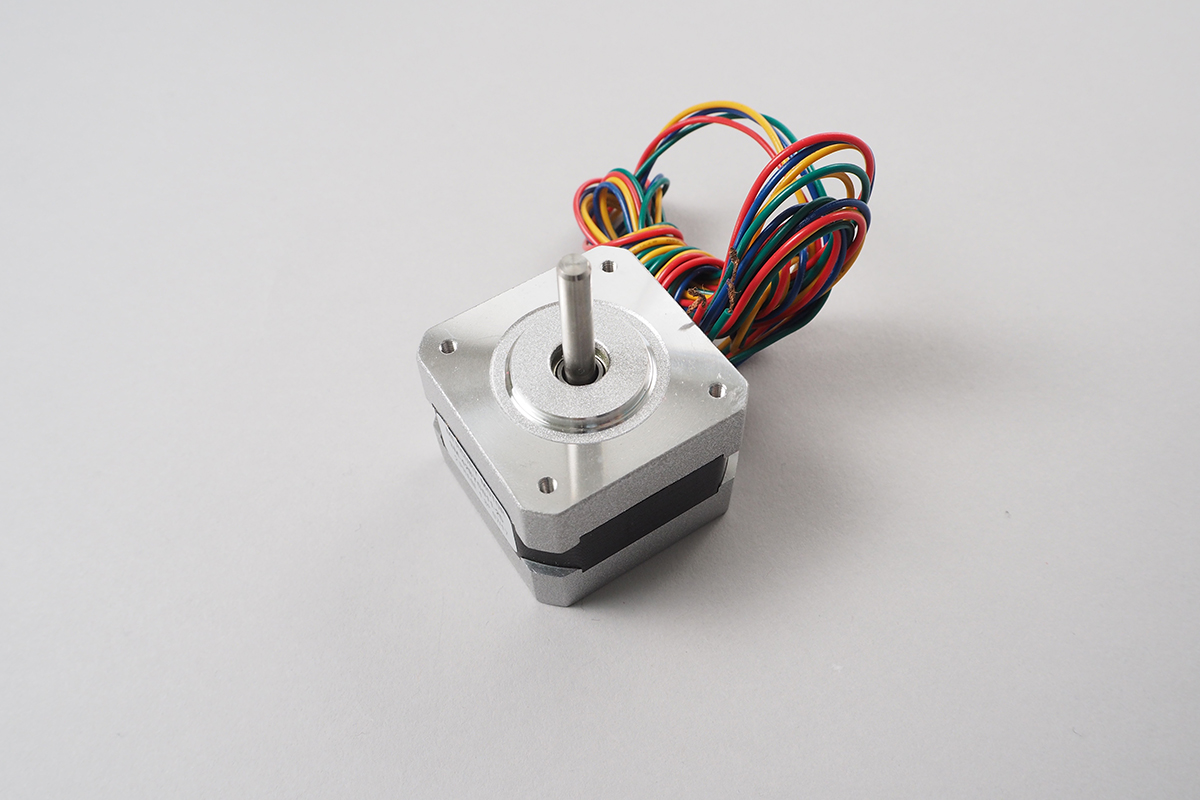
StepperMotor
ステッピングモーター(またはパルスモーター)はDCモーターのように中にあるコイルをとにかく回すというものとは違い、
ある角度ずつ正確に回転させることができるモーターです。ステップごとに動かすのでそのような名前になっています。
ステッピングモーターを使えば正確に回転させたり、移動させたり、または動かないように位置をキープしたりといったことが簡単にできます。逆に高速にパワフルに回転させる用途には向きません。
このライブラリではバイポーラ・ユニポーラのステッピングモーターを駆動できます。obniz Boardから直接つないで動かすため5vで動くものを想定しています。


wired(obniz, {a, b, aa, bb [, common]})
部品と接続したioを指定します。
バイポーラ・ユニポーラ、それぞれでこのように接続します。

ライブラリはcommonの有無でバイポーラかユニポーラかを判断します。
| name | type | required | default | description |
|---|---|---|---|---|
| a | number(obniz Board io) |
no | つないだobniz Boardのioを指定してください。 | |
| b | number(obniz Board io) |
no | つないだobniz Boardのioを指定してください。 | |
| aa | number(obniz Board io) |
no | つないだobniz Boardのioを指定してください。aの逆相を指定します。 | |
| bb | number(obniz Board io) |
no | つないだobniz Boardのioを指定してください。bの逆相を指定します。 | |
| common | number(obniz Board io) |
no | ユニポーラの場合に指定します。 |
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
await motor.stepWait(100);
await motor.stepWait(200);
console.log(motor.currentStep); // => 300
stepType(type: string)
励磁方法を変更します。デフォルトで2となっています。
| name | type | required | default | description |
|---|---|---|---|---|
| type | string |
yes | '2' |
下に詳細を記す |
指定できるのは以下です。
| keyname | type | description |
|---|---|---|
'1' |
1相励磁 | どれか1つのコイルのみを動作する方法。消費電力が少ないが、パワーは弱い |
'2' |
2相励磁 | 必ず2つのコイルを動作する方法。最も一般的 |
'1-2' |
1-2相励磁 | 上記2つを組み合わせた方式で半分のステップで駆動できるのが特徴 |
'1-2'のみステップあたりの移動量が変わるので注意が必要です。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.stepType('1');
await motor.stepWait(100);
await motor.stepWait(200);
console.log(motor.currentStep); // => 300
speed(frequency: number)
速度をHzで指定します。100は1秒間に100ステップとなります。
| name | type | required | default | description |
|---|---|---|---|---|
| frequency | number |
yes | 100 |
ステップ移動の周波数 |
指定できる最大値はモーターとモーターの負荷によって異なります。大きいほどスリップの可能性(動かしたはずなのに実際は動いていない)が上がります
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.speed(1000);
await motor.stepWait(100);
[await] stepWait(step: number)
指定したステップだけ移動します。speedとstepTypeに従ってモーターを駆動します。
| name | type | required | default | description |
|---|---|---|---|---|
| step | number |
yes | - | 動かしたいステップ数 |
小数が与えられた場合は四捨五入されます。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
await motor.stepWait(100);
await motor.stepWait(-100);
// now returned to start position.
[await] stepToWait(destination: number)
目的となるステップ数の場所まで移動します。speedとstepTypeに従ってモーターを駆動します。
| name | type | required | default | description |
|---|---|---|---|---|
| destination | number |
yes | - | 目的となるステップ数。 |
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
await motor.stepWait(100);
await motor.stepToWait(-150); // it move -250 steps
console.log(motor.currentStep) // => -150
[await] holdWait()
今のステップ位置で電流を流し、維持した状態にします。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
await motor.holdWait();
[await] freeWait()
全てのコイルへの電流を停止し、モーターを自由な状態にします。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
await motor.stepWait(100);
await motor.freeWait();
currentStep
現在の位置をステップで表します。初期値は0です。
100ステップ動かし-50動かしたなら50となっています。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
await motor.stepWait(100);
await motor.stepToWait(-150); // it move -250 steps
console.log(motor.currentStep) // => -150
[await] rotateWait(rotation: number)
指定した角度だけ回転させます。
rotationStepCount変数に従い動かすので、先に設定する必要があります。
| name | type | required | default | description |
|---|---|---|---|---|
| rotation | number |
yes | - | 回転させたい角度(度) |
360を指定すれば1回転することになり、-360で逆向きに1回転します。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.rotationStepCount = 100;
await motor.rotateWait(360 * 2);
console.log(motor.currentRotation()); // => 720
console.log(motor.currentAngle()); // => 0
[await] rotateToWait(rotation: number)
始めの角度を0度として指定した角度になるように回転させます。
また、最も少ない移動数でその角度に移動します。
rotationStepCount変数に従い動かすので、先に設定する必要があります。
| name | type | required | default | description |
|---|---|---|---|---|
| angle | number |
yes | - | 目標となる角度(0 to 360) |
355度に移動したあと0を指定すると355度ではなく5度の移動となります。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.rotationStepCount = 100;
await motor.rotateToWait(90);
rotationStepCount
1回転するのに何ステップ必要かを指定します。この値はモーターによって異なります。デフォルトで100となっています。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.rotationStepCount = 100;
await motor.rotateToWait(90);
[await] moveWait(distance: number)
指定した距離(mm)だけ移動します。
milliMeterStepCount変数に従い動かすので、先に設定する必要があります。
| name | type | required | default | description |
|---|---|---|---|---|
| distance | number |
yes | - | 移動距離(mm) |
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.milliMeterStepCount = 10;
await motor.moveWait(100);
await motor.moveWait(-10);
console.log(motor.currentDistance()); // => 90
[await] moveToWait(destination: number)
はじめを0として、指定した位置(mm)に移動します。
milliMeterStepCount変数に従い動かすので、先に設定する必要があります。
| name | type | required | default | description |
|---|---|---|---|---|
| destination | number |
yes | - | 目標位置(mm) |
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.milliMeterStepCount = 10;
await motor.moveWait(100);
await motor.moveToWait(-10);
console.log(motor.currentDistance()); // => -10
milliMeterStepCount
1ミリ移動するのに何ステップ必要なのかを指定します。デフォルトで1となっています。
// Javascript Example
var motor = obniz.wired("StepperMotor", {a:0, aa:1, b:2, bb:3});
motor.milliMeterStepCount = 10;
await motor.moveWait(100);
await motor.moveToWait(-10);
console.log(motor.currentDistance()); // => -10
Supported from: obniz.js 3.5.0