
- Usable Devices :
-
- Found at :
 www.adafruit.com
www.adafruit.com
 a.co
www.aliexpress.com
a.co
www.aliexpress.com
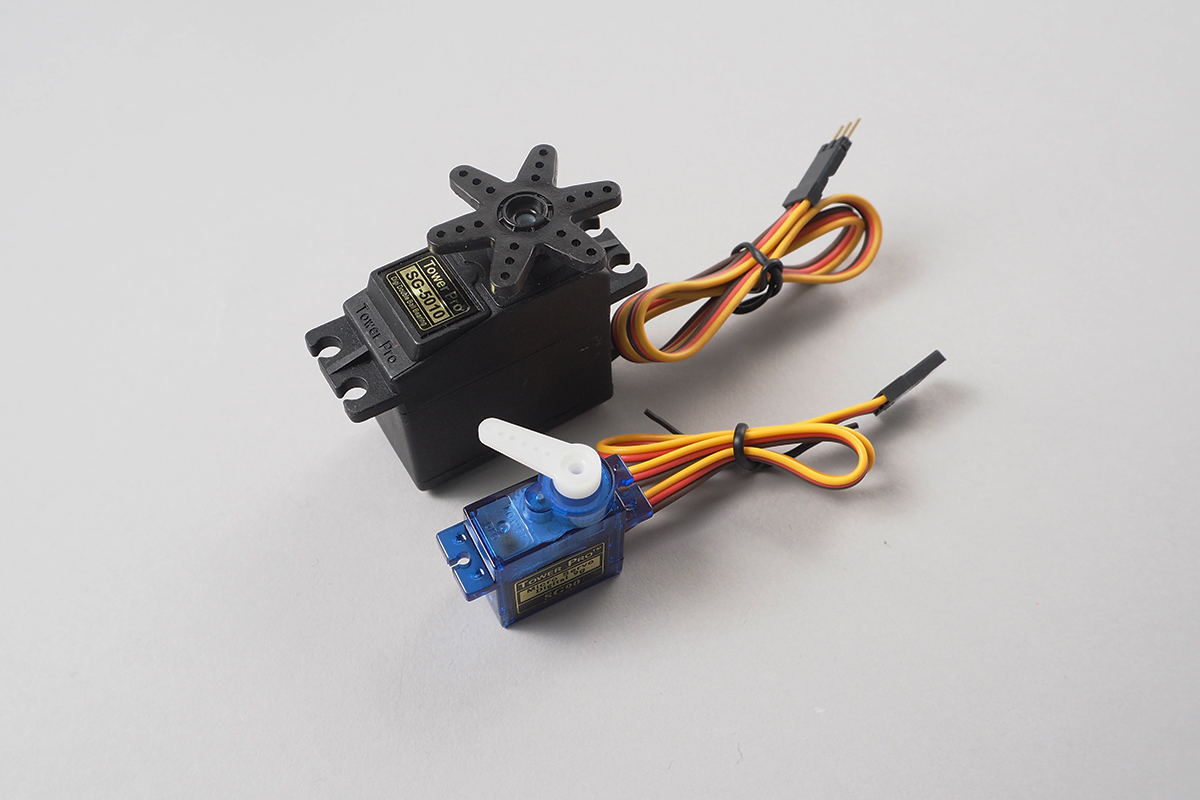
ServoMotor
RCサーボモーターはコンピューターの入っているギヤードモーターです。
角度を維持することができます。
ただ角度をモーターに指示するだけで良いのです。


電源もobniz Boardに繋げられるモーターについて
RCサーボの多くは電源も含めそのままobniz Boardに接続できますが、いくつかの(特に小型の)サーボモーターでは電源の電流がリークしやすくobniz Boardの過電流検知により電源を供給できない場合があります。
その場合は以下のような対策が必要となります。
- (推奨)電源のみ外部から供給する(obniz BoardのJ1ピンはUSB直結なのでそこから供給することもできます)
- ブレッドボードを介してobniz Boardと接続する(ブレッドボードは抵抗が大きく、過電流検知を回避できることがあります。)
obniz Boardのioから直接電源供給を確認したサーボモーター
| メーカー | 型番 |
|---|---|
| Tower Pro | SG-5010 |
| Tower Pro | MG92B |
| Tower Pro | MG90S |
| Tower Pro | MG90D |
| Tower Pro | SG90 |
| Tower Pro | SG92R |
| GWS | S35STD |
obniz Boardのioからでは直接電源供給できないサーボモーター
| メーカー | 型番 |
|---|---|
| Quimat | QKY66-5 |
| FEETECH | FS90R |
obniz.wired("ServoMotor", {[vcc, gnd, signal, pwm]})
3本の足をobniz Boardにつなぎます。それぞれプラス、信号、マイナスとなっていて、製造メーカーなどにより配置が違います。
この例はもっともよく使われている配線パターンです。
obniz Boardのセットに入っているサーボモーターもこのパターンです。

マイナス(gnd)、プラス(vcc)、信号(signal)をそれぞれ obniz Boardの0, 1, 2につないだ場合は以下のようにします。

// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
vccとgndを他の方法で接続している場合はsignalのみの指定でOKです
var servo = obniz.wired("ServoMotor", {signal:2});
また、生成済みのpwmオブジェクトを利用することも出来ます
var pwm = obniz.getFreePwm();
var servo = obniz.wired("ServoMotor", {pwm:pwm});
angle(degree)
角度を0~180により指定します。
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
range = {min, max}
出力するパルス幅を調整できます。
0度180度に応じて0.52.4msecのパルスが出力されますが、それを自分で調整したい場合に利用します。
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.range = {
min: 0.8,
max: 2.4
}
servo.angle(90.0); // half position
on();
サーボモーターの電源を入れます。wiredを呼んだ段階で電源は入っています。offにした後に再度onにしたい時に呼んでください
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
servo.off();
servo.on();
off();
サーボモーターの電源を切ります。信号の供給も停止します。保持力がなくなりますから、モーターに負荷がかかっている場合はoffにすることで勝手に回転します。
// Javascript Example
var servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
servo.angle(90.0); // half position
servo.off();
Supported from: obniz.js 3.5.0